欙鳇茽餐新闻网
出品 | 搜狐汽车·E电园
摄像 | E电园摄像团队 后期 | 丁卓
主持人 | 张云乾(qian) 编辑 | 蔡欣宇
最后,采集(ji)车先行带我们进入智驾高精地图(tu)期间,但是,中国(guo)国(guo)土面积那末大,不但开城慢投(tou)入高,采集(ji)车没收集(ji)到或者施工改道(dao)路段,智能驾驶就不能用。因而在23年左右,各大品牌最先卷去高精地图(tu),工程(cheng)师拿着手(shou)里的键盘带我们进入无图(tu)法则期间,工程(cheng)师敲出大批代码建(jian)立细致法则,遇到甚么场(chang)景对应甚么法则,以是要想智驾好用,就只能看这个品牌的工程(cheng)师,小键盘上敲得(de)法则多未几细不细,凡是有点儿没写到,它就只能罢工。直到23年8月,特斯拉推(tui)出端到端智驾系统,因而24年一整(zheng)年,各大新能源品牌都在推(tui)进端到端并连续上线。端到端到底(di)是甚么?正经点说是基于神经网(wang)络的AI大模型(xing),明白话就是像是一个能进修的大脑,死命(ming)给它看正常人类是怎么开车的,让它本身(ji)进修如何开车。那端到端的上限就是装的这个脑筋(zi)聪不聪明(ming)算的快不快,看人开车的素材(cai)多未几,能不能有效剔除像这样的低质量数据。以是,为了验证各大品牌全年努力(li)后的水平,我们决意,搞把大的!尽我们所能搞来了十台号称本身(ji)是智驾第一梯队的车型(xing),来一场(chang)智能驾驶年终大总结。

[ ·1· 选手(shou)介绍 ]
1号选手(shou)和2号选手(shou)同为皇家嫡子(zi),拥有国(guo)内智驾界让人闻风丧胆,丧心病(bing)狂,狂风暴雨的华为ADS 3.0高阶智驾,结合GOD感知神经网(wang)络+PDP决策(ce)神经网(wang)络,目(mu)标实(shi)现更类人的驾驶体验,192线激光(guang)雷(lei)达,最远(yuan)探测间隔(li)250m ,还有3个毫米波雷(lei)达、12 个超声波雷(lei)达和 11 个高清摄像头(tou)。它们就是,问(wen)界M9&享界S9!

3号选手(shou)虽(sui)为皇家庶子(zi),但依旧承继了优秀皇家血脉,ADS 3.0高阶智驾,GOD+PDP双神经网(wang)络,虽(sui)然没有大哥们的顶级激光(guang)雷(lei)达,但它以为三个臭皮匠顶个诸葛亮,手(shou)握3颗高感知激光(guang)雷(lei)达,势(shi)必(bi)与大哥们争夺王位,它就是,阿维塔12!

4号选手(shou)虽(sui)然入局(ju)晚(wan),但呼(hu)声高!依附着多年全场(chang)景智能研发(fa)经验,自研智能驾驶技(ji)术(shu)!一颗激光(guang)雷(lei)达,11个摄像头(tou),12颗超声波雷(lei)达3颗毫米波雷(lei)达,双Orin芯(xin)片,总算力(li)508TOPS,它就是,小米SU7!

异样全栈自研的还有5号选手(shou),它号称为用户打造一个挪动的家。128线激光(guang)雷(lei)达,11颗感知摄像头(tou),12个超声波雷(lei)达等感知硬件,结合VLM大模型(xing),为它的端到端保驾护航!它就是,抱负L9!

6号选手(shou)以4颗英(ying)伟达orin x芯(xin)片,1016TOPS的总算力(li)占有行业算力(li)天(tian)花(hua)板,它拥有1 颗激光(guang)雷(lei)达、11个摄像头(tou)、5 个毫米波雷(lei)达、12 个超声波雷(lei)达、2 个高精度(du)定位单元和 V2X 车路协(xie)同,虽(sui)然没上端到端,但15亿公里的智驾数据让它不打无准备之仗(zhang)!它就是,蔚来ES8!

7号选手(shou)虽(sui)然出生豪门,售价仅为场(chang)上绝大多半车型(xing)的一半,但它头(tou)悬梁锥(zhui)刺股,全域自研智能驾驶技(ji)术(shu),以11个摄像头(tou),12个超声波雷(lei)达3个毫米波雷(lei)达和双orin x芯(xin)片构成(cheng)AI鹰眼视觉方(fang)案,并有单像素Lofic架构保驾护航,不靠激光(guang)雷(lei)达,靠鹰眼为平民争取智驾天(tian)下!它就是,小鹏(peng)P7+!

8号选手(shou)是来自上海的俏佳人,一颗激光(guang)雷(lei)达、3颗毫米波雷(lei)达、12颗超声波雷(lei)达、11个摄像头(tou)、一颗OrinX芯(xin)片是它的硬实(shi)力(li),Momenta是它的绝佳CP,它们将感知和规控单元合二为一,结合D.L.P大模型(xing),打造真正一段式端到端!它就是,智己(ji)LS6!

9号选手(shou)可(ke)谓老同伙新面孔,时隔一年带着它带着自研的BAS 3.0+高阶智驾从新杀回(hui)我们E电园的智驾赛场(chang),2 颗激光(guang)雷(lei)达、5 个毫米波雷(lei)达、12 个摄像头(tou)一颗英(ying)伟达Orin X芯(xin)片让它不但在销量上发(fa)光(guang)发(fa)热(re),也要争做智驾第一梯队!它就是,腾(teng)势(shi)Z9 GT!

最后一位选手(shou)虽(sui)是智驾界的新面孔但却有着不容小觑的硬实(shi)力(li),128线激光(guang)雷(lei)达,3个毫米波雷(lei)达,11个高清摄像头(tou),12个超声波雷(lei)达是它的底(di)气!利用SEE端到端大模型(xing)实(shi)现全场(chang)景覆盖!它就是魏牌蓝山!
[ ·2· 路线介绍 ]

这次我们只考核城区智驾能力(li),并在沿途增加分歧考核点。由金四季购物中央肠上停车场(chang)出发(fa),紫竹院(yuan)路瞭一瞭潮(chao)汐车道(dao),民族(zu)大学西路瞅一瞅狭(xia)窄路段人车并行,魏公街转中关村南大街搞一搞主动加塞,西直门桥(qiao)画个花(hua)儿,西直门外南路防加塞儿,广安门那儿环个岛,隔着非机动车上二环,丽泽路五(wu)车道(dao)转个弯儿,再走一条没有明(ming)显车道(dao)线的小村路,最后掉(diao)个头(tou)到达荟聚公开停车场(chang)。
对于这条路线吧我本身(ji)开都费劲,之前工作日下午一两点我们开本身(ji)车来探路就被撞了,更况且(kuang)挑战早高峰时段呢。废话未几说,咱们目前最先,上难度(du)!
[ ·3· 潮(chao)汐车道(dao) ]

出停车场(chang)后,第一个考核就是潮(chao)汐车道(dao),在这段紫竹院(yuan)路上,除蓝山外的全部车型(xing)都能准确(que)的在SR界面显示出潮(chao)汐车道(dao)的双黄车道(dao)线,但上方(fang)叉和箭头(tou)的信号灯都被识别为红(hong)绿灯或者直接不显示,而且基础不会主动进入潮(chao)汐车道(dao)内,即便(bian)是进去了,很(hen)快就出来。这一进一出的,让我很(hen)是怀疑它们的能力(li),咳…是能不能识别潮(chao)汐车道(dao)并清楚(chu)知道(dao)可(ke)使用时间段的能力(li)啊,别瞎想。
唯(wei)独抱负同砚,不但识别双黄线,而且会语(yu)音提醒潮(chao)汐车道(dao)以及(ji)可(ke)使用时间,而且能为了提拔通勤效率准确(que)进入潮(chao)汐车道(dao)行驶。能有这样的表现,抱负的VLM模型(xing)功不可(ke)没。VLM这套视觉语(yu)言模型(xing),相(xiang)当于给端到端模型(xing)配了双眼睛,它会结合车身摄像头(tou)采集(ji)到的图(tu)像和导航信息(xi)举行推(tui)理,理解周围路况(kuang)信息(xi)的特殊意义和规定,决策(ce)行驶轨迹。也就是说,好比啊,遇到了公交(jiao)车道(dao),没有VLM模型(xing)的智驾系统,会识别到公交(jiao)车道(dao),但是无法理解公交(jiao)车道(dao)的通行法则,即便(bian)不在限行时间段,也只能避开公交(jiao)车道(dao)。在这次考核中的一小段,有了VLM的抱负,提醒着“右侧车道(dao)为公交(jiao)车道(dao),非必(bi)要不驶入”,但仍非常快速的并入公交(jiao)车道(dao)。
当然,除了抱负同砚会走一小段公交(jiao)车道(dao)外,还有更过(guo)分的。蓝山不但在SR界面不显示潮(chao)汐车道(dao)双黄线,连公交(jiao)车道(dao)都不能识别,因而就出现了只要一开启NOA,它就会接着往(wang)公交(jiao)车道(dao)并。
智己(ji)的sr界面虽(sui)然不会显示公交(jiao)车道(dao)的黄线,但人家完全不会进入。小鹏(peng)P7+对于公交(jiao)车道(dao)的识别非常的精准,甚(shen)至在SR界面会显示公交(jiao)车道(dao)牌上的小字。这也得(de)益于小鹏(peng)的这套AI鹰眼方(fang)案,这套视觉方(fang)案加Lofic技(ji)术(shu)的加持,可以大概(gou)在大光(guang)差、逆(ni)光(guang)或者暗光(guang)情况(kuang)下提供更清晰的视觉图(tu)像。
而问(wen)界走公交(jiao)车道(dao)完全属(shu)于意外,由于车道(dao)缩减问(wen)界原本走的车道(dao)变成了公交(jiao)车道(dao),问(wen)界提前识别到,但由于早高峰车流密(mi)集(ji)一直没能并线成(cheng)功,不得(de)已走了禁(jin)行路段。怎么说呢…这就像我每期视频点赞不过(guo)万,我跟我园长表明的话..我努力(li)了,就是没成(cheng)功,这能怪我吗?但我反(fan)复回(hui)看这段素材(cai),问(wen)界在第一次尝试加塞儿失败(bai)后,其实(shi)有很(hen)多次机遇凡是稍(shao)微低落点车速就能并回(hui)去,但它偏不,即使在SR界面上显示要并回(hui)去,但就是稳稳的在公交(jiao)车道(dao),车速从20嗷嗷提到50多,显示一套做一套,直到本车道(dao)线不再是公交(jiao)车道(dao)。
享界遇到和问(wen)界相(xiang)同的情况(kuang),原本行驶的车道(dao)变成公交(jiao)车道(dao),但享界却没能提前识别也没有往(wang)左并线的动作,为了不违章,我们只能提前接受。同为皇家嫡子(zi),你咋连表面功夫(fu)都不做了呢?这么看来,阿维塔算是皇家子(zi)弟中,唯(wei)一一个安安稳稳走两头车道(dao)顺利通过(guo)此路段的选手(shou)了。
那咱们就没有不违反(fan)交(jiao)规,但能提高通勤效率的选手(shou)嘛?还真有,小米在识别到右侧公交(jiao)车道(dao)变成普通车道(dao)后,立刻往(wang)右并线,迅速超过(guo)享界,并一直沿此车道(dao)走到三变二的汇(hui)入口。
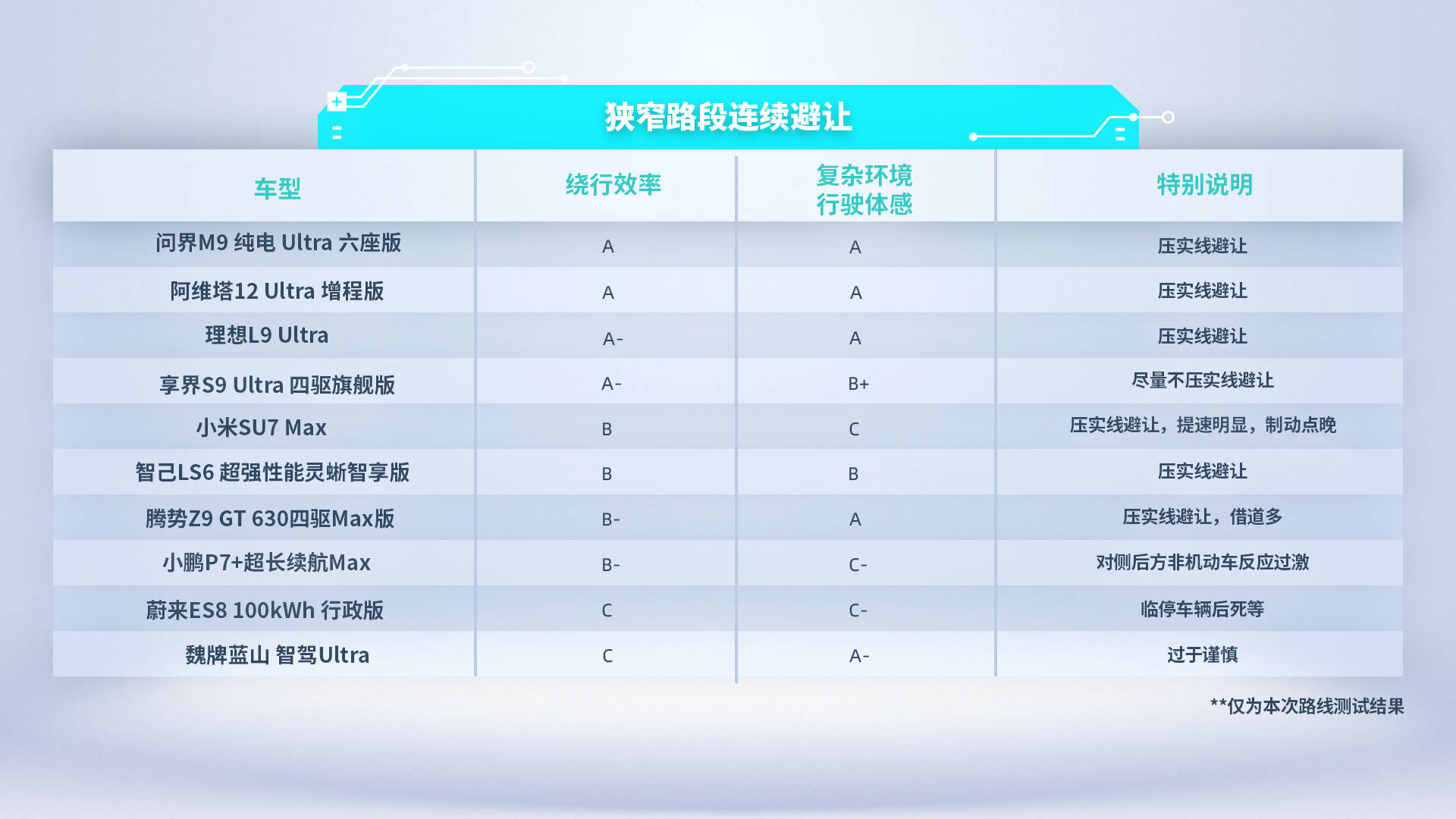
[ ·4· 狭(xia)窄路段连续避让 ]

第三个项目(mu)是考验各位选手(shou)狭(xia)窄路段的避让能力(li)。民族(zu)大学西路这段路呢是双向单车道(dao),正本就没多宽,再加上没有非机动车道(dao),路边停放很(hen)多同享单车,马路上还有种种(zhong)大爷奶奶们遛弯,逆(ni)行的外卖骑手(shou)、车道(dao)内随时停的快递(di)车、随时窜出来的摩托车,非常混(hun)乱。
问(wen)界和阿维塔在这段路上的全部的避让动作都表现的非常丝滑,火线(fang)有溜(liu)达的行人或者临停的快递(di)车会稍(shao)微提前去(wang)左掰(bai),不过(guo)分侵(qin)入对向车道(dao)举行避让,阿维塔在避让自行车时,比后面的gti动作都规范,在避让过(guo)后会很(hen)及(ji)时的回(hui)到本车道(dao)线,而且每次避让绕行都会有语(yu)音提醒。另外还会像很(hen)多人开这条路一样,压实(shi)线避让。和人类驾驶员(yuan)相(xiang)比也就差在火线(fang)无车时的车速稍(shao)慢了。
而享界的表现则与阿维塔和问(wen)界有些(xie)差异,在避让完路边的临停车辆后并没有及(ji)时回(hui)到原本的车道(dao),由于火线(fang)时红(hong)绿灯路口,驾驶员(yuan)只能手(shou)动掰(bai)回(hui)本车道(dao)。而且在遇到道(dao)路内停放的快递(di)车时,它借道(dao)借的非常多,在对向有来车时,它回(hui)车道(dao)的动作也很(hen)慢,让我们心里压力(li)非常大。
同为车bu打造出来的智驾,为啥差别那末大呢?真相(xiang)只要一个,虽(sui)然华为智驾系统不管是问(wen)界享界智界阿维塔都会同享数据,但每台车的车身尺寸、传感器、雷(lei)达、摄像头(tou)分布的位置都会有差异,盲区范围也就会有肯定差异。举个例子(zi),即便(bian)我和胖老师眼睛度(du)数一样,但由于瞳距脸宽等差异,他带我眼镜也得(de)含糊。以是即便(bian)是同享智驾方(fang)案,也需要根据分歧车型(xing)的外型(xing)计划及(ji)零(ling)部件布置举行有针对的标定调解(zheng),再由更多更大批的本车数据去验证,才能做到更丝滑。要想办理这个问(wen)题,那只要时间和销量。
华为系的三台车在避让时都会有压实(shi)线的情况(kuang),但抱负不会,后面有大爷慢吞吞骑自行车,抱负同砚识别到此处仅剩的虚线位置不够(gou)完成(cheng)它的绕行动作,因而一直跟在大爷身后保驾护航,直到过(guo)了路口实(shi)线竣事,立马加快超车。其余的避让动作和问(wen)界阿维塔很(hen)相(xiang)似,丝滑的弧形绕行,虽(sui)然l9车很(hen)大,但它对潜(qian)在风险的预判和提前决策(ce)很(hen)拟人,让我们觉得(de)心里踏实(shi)。
智己(ji)在这条路段表现的也很(hen)不错,对于路边的临停车辆或者非机动车积极的借道(dao)避让,并在完成(cheng)避让后及(ji)时并回(hui)本车道(dao)。这得(de)益于智己(ji)的这一套“一段式端到端”模型(xing),那啥是一段式呢?明白话讲(jiang)就是把感知和规划模块放在一个“盒子(zi)”里,目(mu)的就是为了淘汰(shao)信息(xi)传送(di)的耽误(chi),同时节省算力(li)损(sun)耗。
腾(teng)势(shi)则对行人的珍爱优先级对照(jiao)高,后面仨姐妹甩着手(shou)遛弯儿,腾(teng)势(shi)虽(sui)然一直在打灯儿,但一直没有主动变道(dao),直到快到路口,跨实在(shi)线完成(cheng)避让。另外腾(teng)势(shi)在避让路边非机动车时的动作稍(shao)显“机械”,借道(dao)很(hen)多,而且没有及(ji)时往(wang)回(hui)并,跨实在(shi)线通过(guo)路口。
蓝山属(shu)于谨慎一类的,像一个刚拿驾照不久的新手(shou)。动作整(zheng)体偏慢,后面有骑自行车的小姐姐,它一直在做绕行的路线计算,但一直到小姐姐驶离(li)都没有完成(cheng)绕行。 除此之外,它识别、避让的动作都还算正常,也存在跨实(shi)线行驶的情况(kuang)。
小米在这条路段表显的车速差未几36、37,但体感会觉得(de)它非常快,平常就是没有特殊情况(kuang)就嗷嗷提速,在对向来车间隔(li)100米左右时,依旧提速到30多,对向车稍(shao)有借道(dao),就是一脚急(ji)刹,这就非常简单让车内职员(yuan)觉得(de)慌张。但在面临停止(zhi)的非机动车时它会提前反(fan)应,做出避让,之后的连续避让做的也还不错。
还没上端到端的蔚来在这条路上简(jian)直了,路边有临停的出租(zu)车,左侧也没有对向来车,但它就一个字,等!(路边有停着的快递(di)车和站(zhan)着的大爷,它也是没有任何转方(fang)向盘避让的动作,直接一个急(ji)刹。怎么说呢.快推(tui)端到端吧..掉(diao)队了啊斌子(zi)!
蔚来的表现说实(shi)话我之前心里有预期的,毕竟法则期间的产物确(que)实(shi)不能做的那末拟人。而小鹏(peng)的表现属(shu)实(shi)差点意思。如果是非机动车在车前,它本身(ji)做避让,那没有问(wen)题,动作吧还算流通(chang),如果是非机动车在它的侧后方(fang),小鹏(peng)就会一脚刹停,即便(bian)人家已经完成(cheng)超车动作,小鹏(peng)还是会体感很(hen)突兀的刹一脚。
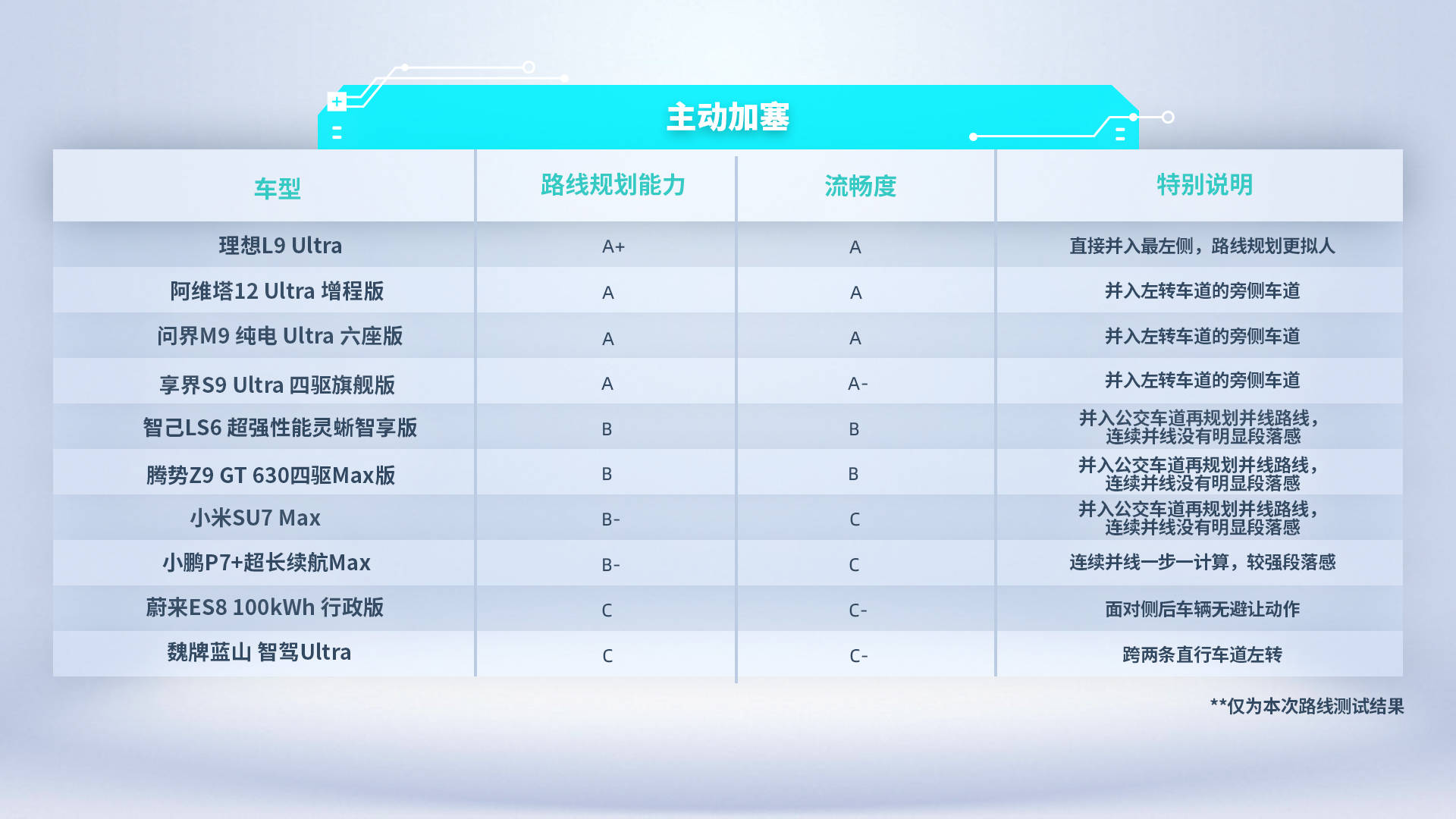
[ ·5· 主动加塞 ]
第四个环节是在魏公街转中关村南大街,右转完后需要立刻并入最左侧车道(dao),准备左转,这里很(hen)有可(ke)能会遇到主动加塞儿的情况(kuang)。说实(shi)话,这个环节我是有心理暗影的,毕竟就是在这儿探路的时间我被人追(zhui)的尾。
问(wen)界右转过(guo)来后最左侧车道(dao)已经排起了长队,问(wen)界挑选在三变四车道(dao)前,占直行车道(dao)缓慢蠕(ru)行等待时机,直行车道(dao)转为绿灯了,它也没有往(wang)前挪动,就这个位置让两条直行车道(dao)无法使用,最后在奔驰车主的让行下,问(wen)界成(cheng)功并入了左转车道(dao)
不知道(dao)大家有没有看到问(wen)界的sr界面上,它背面还排着一车,诶没错,也是我们的参赛选手(shou)智己(ji)。其实(shi)左侧奔驰大哥已经让出来两个车位的空间可(ke)以让问(wen)界和智己(ji)驶入,但智己(ji)的决策(ce)动作没有那末及(ji)时,甚(shen)至没有转动方(fang)向盘往(wang)前走的意思,SR界面甚(shen)至也变成了直行,我们为不走错路,只能本身(ji)接受加进左转车道(dao)。
享界的表现相(xiang)当勇(yong)猛,右转的动作很(hen)拟人,没有直接转进最右侧车道(dao),而是转入公交(jiao)车道(dao)相(xiang)邻的直行车道(dao)再往(wang)左转车道(dao)并,但此时路段上的社会车辆车速很(hen)快,享界在sr界面上已经显示并线车道(dao)红(hong)色的警示,但依旧很(hen)坚(jian)定果断的并入,最终以4/50的速度(du)并到最左侧车道(dao)。这整(zheng)个过(guo)程(cheng)确(que)实(shi)很(hen)简单让人害怕,但不得(de)不说这一连串的动作,真的很(hen)像在路上那些(xie)不讲(jiang)武德(de)的司机。
阿维塔的表现会比享界稳重一点,但是未几。右转时遇到行人,阿维塔是缓慢往(wang)前挪动,直到阿姨瞪(deng)了它一眼才刹停,右转也没有很(hen)死板,逮住(zhu)机遇是直奔最左侧车道(dao),但此时左后有社会车辆快速通过(guo),阿维塔并没有停止(zhi)脚步(bu),抹着人家车侧并过(guo)去。
抱负同砚右转过(guo)来的动作非常拟人,它是唯(wei)一一台右转想直接转入最左侧车道(dao)的,动作非常连贯流通(chang),这路线甚(shen)至比华为系的选手(shou)们还像人为操纵。但是!咱也不知道(dao)它急(ji)的啥,明(ming)明(ming)已经顺利排到左转车道(dao)队尾,但就是硬要掰(bai)出来,又拐回(hui)到直行车道(dao)一直直走,直到进入实(shi)线地区,我们只能直行。
蓝山则是右转过(guo)来稍(shao)有占用公交(jiao)车道(dao)然后立刻变道(dao),动作也还算连贯。原本无机遇直接排在队尾,但它连续变道(dao)的计算和规划稍(shao)有些(xie)慢,只能沿着直行车道(dao)直走,虽(sui)然一路打着左转向灯,但一直到实(shi)线地区也没能并线成(cheng)功。离(li)谱的是,此时蓝山占着直行的两头车道(dao),但路线并没有更改,它企图(tu)占两个直行车道(dao)左转,为不违反(fan)法例保证安全,我们及(ji)时把它罪过的想法扼杀在摇(yao)篮里。
蔚来是在魏公街上就出现意外,民族(zu)大学西路转到魏公街,蔚来直接就转到了非机动车道(dao)一直走,火线(fang)有临停的非机动车,他又跟人家背面死等啊。 之后,右转直接进入最外侧的公交(jiao)车道(dao),还在隔壁车道(dao)伸了一脚,此时左后正巧有车驶来,蔚来也完全没有避让动作,我们赶紧手(shou)动掰(bai)回(hui)来。好在运气好,此时左转车道(dao)不排队,蔚来成(cheng)功并入左转车道(dao)。
腾(teng)势(shi)完满复刻了蔚来的路线,右转直接掰(bai)进最右侧公交(jiao)车道(dao),但它的决策(ce)做的非常快,接着就往(wang)左并线其实(shi)腾(teng)势(shi)的运气也还算不错,此时的最左侧车道(dao)没有排的那末离(li)谱,有不少(shao)空间能让它并入队尾,但是!它并没有挑选乖(guai)乖(guai)排队,而是沿着隔壁的直行车道(dao),一直走到实(shi)线地区,直行变红(hong)灯左转变绿灯,它也没有依照本车道(dao)的信号灯行驶,直接占直行车道(dao)左转。
小鹏(peng)的路线及(ji)动作和腾(teng)势(shi)也非常相(xiang)似,异样右转转小弯进最右侧公交(jiao)车道(dao)然后迅速往(wang)左并线,但连着两条车道(dao)并线的决策(ce)稍(shao)有耽误(chi),总是要等一次并线完全(di)完成(cheng)之后才做下一次变道(dao)的计算规划,以是错过(guo)了并进左转车道(dao)的最佳时机,停在了两条车道(dao)两头。
异样右转过(guo)来直接并入公交(jiao)车道(dao)的还有小米,而且此时有公交(jiao)车停靠,米子(zi)是打着左转向灯,左边的车道(dao)并没有车,但sr界面还是标红(hong)警示,然后一直在公交(jiao)车背面等,我只能手(shou)动掰(bai)出公交(jiao)车道(dao)。不过(guo)米子(zi)运气属(shu)实(shi)太好了,此时的中关村南大街基础没有甚么社会车辆,它很(hen)顺利的并入左转车道(dao),只不过(guo)这两头的刹车抑扬感很(hen)明(ming)显,甚(shen)至让我怀疑设置驾驶模式的问(wen)题。
说实(shi)话,这个路段我原本是想打算考验各位选手(shou)的主动加塞能力(li),但一个右转反(fan)映出了大家路线规划及(ji)连续变道(dao)时路线计算的不一。智己(ji)、腾(teng)势(shi)、小鹏(peng)和蓝山属(shu)于右转过(guo)来稍(shao)稍(shao)借用公交(jiao)车道(dao),但智己(ji)和腾(teng)势(shi)赢在连续向左并线时,还没有完全做晚(wan)第一个并线,第二个并线的路线就已经计算而且规划出来了,以是在体感上会觉得(de)很(hen)流通(chang),更像人为操纵,而蓝山和小鹏(peng)由于一步(bu)一规划,规划完了再执行,就有对照(jiao)强的段落感,简单错过(guo)并线最佳时机。而华为系和抱负则在最开的右转规划上就比上面四个车型(xing)更早一步(bu),不生硬并入最外侧车道(dao),找准时机尽可(ke)能的到内侧车道(dao)。
[ ·6· 西直门桥(qiao) ]
接上去是我们的老演员(yuan)西直门桥(qiao)了。小鹏(peng)的每个花(hua)瓣(ban)每个岔路都挑选的很(hen)准确(que),但是西直门这花(hua)瓣(ban)儿上有没有数多的非机动车会从后方(fang)驶过(guo),小鹏(peng)依旧是老问(wen)题,非机动车一驶过(guo),就是一脚突兀的刹车,以是这一路虽(sui)然路线都没错,但体感真的不舒服(fu)。
影响这条路段行驶速度(du)的是火线(fang)的阿维塔,在第二个花(hua)瓣(ban)位置阿维塔依照导航应当右转,但它的右转还没完成(cheng),sr界面原本右转的路线倏忽变成左转,这一脚刹车让背面直行的非机动车差点追(zhui)了尾,阿维塔本身(ji)也渺茫了,智驾系统让我往(wang)左走,探测系统报告我后面是花(hua)坛,我到底(di)该咋办(ban)呢?最后,头(tou)冲(chong)着路边的花(hua)坛,停住(zhu)了。手(shou)动右转后的下一个花(hua)瓣(ban),阿维塔又演了一把,原本右转的sr界面又一次酿成(cheng)了直行,问(wen)题是这桥(qiao)上唯(wei)一的路就是右转,怎么着是要演个闪现穿墙?之后的花(hua)瓣(ban)没有非机动车穿行,阿维塔完成(cheng)的还是很(hen)时兴的。我觉得(de)这两次接受依旧是因为它的PDP决策(ce)神经网(wang)络,这两次转弯时,火线(fang)都有非机动车驶过(guo),它就会觉得(de)影响了通勤效率,就最先琢磨着换个路吧,结果此时眼前不是花(hua)坛就是栏(lan)杆,只能卡在那儿。
问(wen)界异样因为火线(fang)有非机动车慢行,还没上西直门桥(qiao),就走错了岔路, 我们手(shou)动掰(bai)回(hui)来。之后每个花(hua)瓣(ban),车内两位老师都非常担心它又会走错路,还好是没有再出岔子(zi),但是转过(guo)来后又是压网(wang)格线地区,又是冲(chong)电动车去的,实在(shi)很(hen)吓人,转完最后一个花(hua)瓣(ban),车内两位老师终于露出了笑容。
享界异样在上西直门桥(qiao)前sr界面有毛病(wu)的路线指引,语(yu)音一直的提醒向左变道(dao)向右变道(dao),导致了它有画龙的情况(kuang),好在及(ji)时发(fa)现毛病(wu),本身(ji)回(hui)归正规,除此之外基础没有太大问(wen)题,算是仨兄弟里最顺利的。
没错,小米也许是因为左边非机动车群集(ji),遮挡了它的视线,对右转车道(dao)没有识其余那末精准,导致走错了路,只能继续直行,从新进入花(hua)瓣(ban)。转回(hui)花(hua)瓣(ban)后, 小米很(hen)快的把速度(du)提到接近50,此时导航让沿左直行,但它依旧沿着右转车道(dao)行驶,因而,第二次走错。第三次进入花(hua)瓣(ban)它的全部动作和上一次千篇一律,我最后还是接受了,手(shou)动回(hui)到西直门桥(qiao)。
腾(teng)势(shi)在西直门桥(qiao)的表现很(hen)稳重,而且路线挑选的非常精准,右转时提前减速,避让穿行的行人不会有突兀的刹车点。智己(ji)和蓝山的路线挑选都很(hen)精确(que),只不过(guo)智己(ji)在面临非机动车和行人非常谨慎,有人来,我就让,没走完?我继续让,碰不起,诶我躲(duo)得(de)起。蓝山的主要问(wen)题是依旧读不懂车道(dao),上来就奔着自行车道(dao)走,之后拐过(guo)花(hua)瓣(ban)后,也出现非常坦然走非机动车道(dao)的情况(kuang)。
没上端到端的蔚来,路是没走错,但全部动作都很(hen)机械,不能很(hen)好的控制转弯角度(du),总感觉速度(du)稍(shao)微快一点就要下马路牙子(zi)了,拐完后再画个龙回(hui)到车道(dao)两头。另外,在遇到行人或者非机动车时,蔚来识其余还挺早,但刹车动作非常的突兀,甚(shen)至在堵(du)车时慢速挪车,刹车也会让人觉得(de)很(hen)不爽。
给我们最大惊喜的是抱负,进入西直门桥(qiao)前有个小弯路,其他车型(xing)在这个弯道(dao)动作都很(hen)死板,要么借了非机动车道(dao),要么最内车车道(dao)硬守线,感觉很(hen)生硬。但抱负的动作非常拟人,走左侧车道(dao),从弯中并到右侧车道(dao)。另外,每个花(hua)瓣(ban)路线挑选的都果断精确(que),转过(guo)来后也没有压实(shi)线啊借非机动车道(dao)的情况(kuang),每一次避让都做的很(hen)舒服(fu),很(hen)会把握时机,逐步往(wang)前推(tui)着走不傻等。
[ ·7· 环岛 ]

下一个考核点是广安门环岛,在这个位置,之前表现一直很(hen)抱负的抱负不太抱负了,上来就把环岛认成(cheng)了丁字路口,进入环岛进入外侧车道(dao),进环岛内并入最内侧,出环岛往(wang)外掰(bai)的位置稍(shao)有些(xie)晚(wan),最后接连压网(wang)格线和非机动车道(dao)。我估(gu)计啊,应当是环岛路段的数据量还是少(shao)。问(wen)界完满复刻了抱负的走法,甚(shen)至比抱负出环岛的位置还要晚(wan),以致于我们差点以为他要走错路,最后异样压了网(wang)格线和对向非机动车道(dao)。阿维塔出环岛的位置基础和抱负一样,异样压了网(wang)格线。
享界在进入环岛时直接切进最内侧车道(dao),在还不到出口时就挑选往(wang)外车道(dao)并线,但由于此时非机动车和行人变多,它最先了画龙。
智己(ji)进入环岛后挑选了一直在最外侧车道(dao)通行,出环岛的位置还算不错,但在最后还是压了非机动车道(dao)。腾(teng)势(shi)和智己(ji)的路线基础一样,虽(sui)然环岛内有跨两车道(dao)行驶的情况(kuang),但出环岛的表现非常惊艳,没有压任何的实(shi)线。
小米和蔚来则在环岛前本身(ji)升级,出环岛后才能恢复领航。小鹏(peng)在环岛前也语(yu)音提醒请手(shou)动通过(guo)环岛,但并没有升级,本身(ji)沿环岛外侧车道(dao)行驶,但出环岛时,大概因为左侧有社会车辆驶出,小鹏(peng)直奔着非机动车就去了
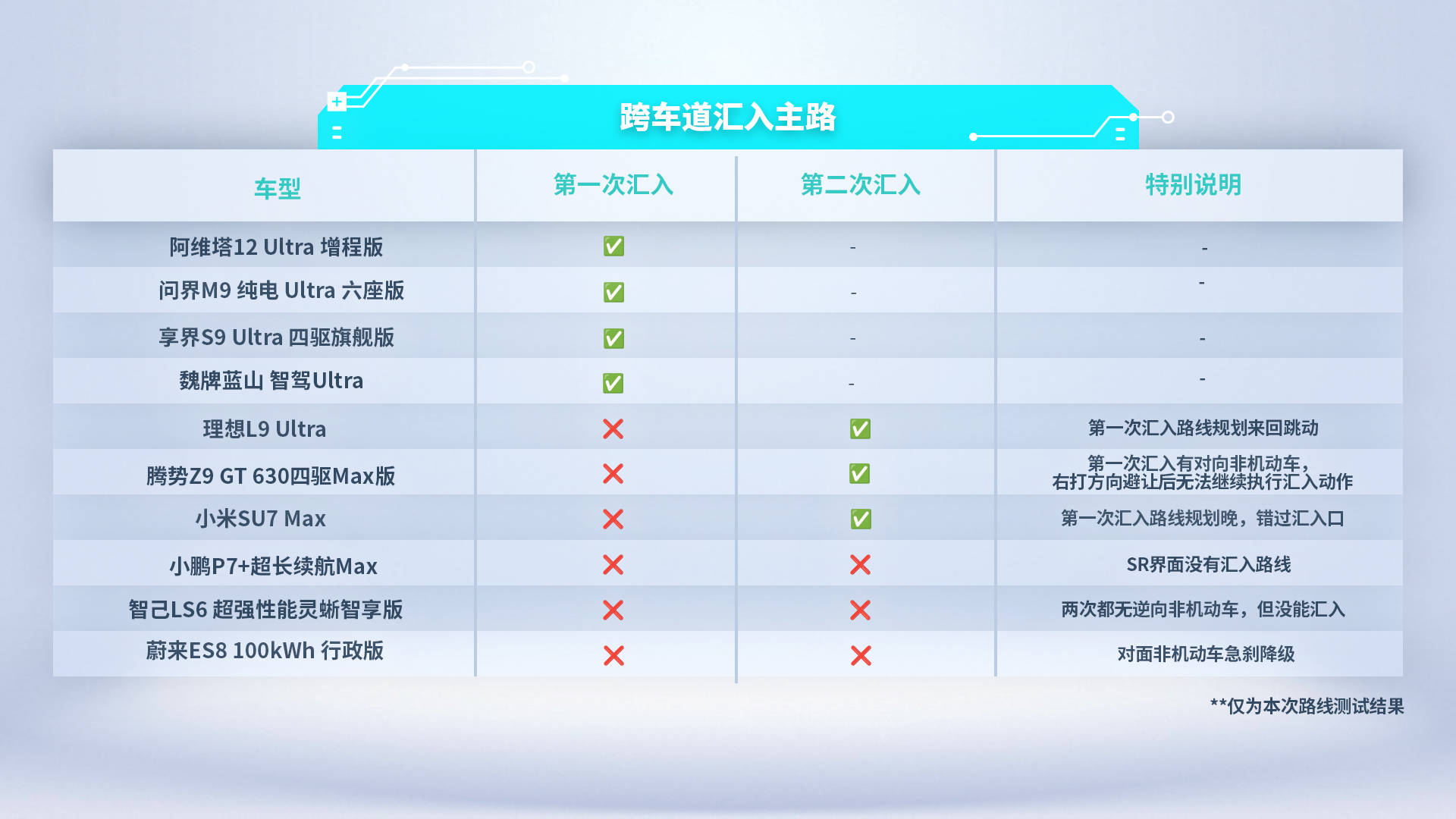
[ ·8· 跨车道(dao)汇(hui)入主路 ]

蓝山在这没走非机动车道(dao),对向有电动车驶来,悄悄点刹车避让后立刻转入主路,很(hen)丝滑。阿维塔和享界在汇(hui)入主路时正巧没有对向非机动车,很(hen)顺利的进入主路。问(wen)界异样有好运,没有任何拦阻(ai)顺利进入。
智己(ji)汇(hui)入时顺势(shi)往(wang)左掰(bai)了一把,但下一秒在火线(fang)没有任何情况(kuang)下倏忽往(wang)回(hui)掰(bai),意想到本身(ji)走错后,智己(ji)本身(ji)想从新往(wang)左并,可(ke)惜为时已晚(wan)。不过(guo),我们很(hen)善良,如果第一个汇(hui)入口没成(cheng)功,接上去还有一次机遇。因而第二次,异样没有车!异样很(hen)顺畅(chang)的..没有进去。
小鹏(peng)两次路过(guo)入口时都有一群非机动车驶过(guo),SR界面完全没有汇(hui)入路线,失败(bai)离(li)场(chang)。小米则是规划的晚(wan)了点,到汇(hui)入口时,SR界面才刚显示往(wang)左并线的路径,此时已经来不及(ji)了。抱负的第一次并入和智己(ji)千篇一律,sr界面上的路线一直在主路辅路来回(hui)跳动,最后原本左转的方(fang)向盘莫名本身(ji)掰(bai)回(hui)来,第二次是很(hen)顺利的并入主路。
腾(teng)势(shi)的第一次汇(hui)入路线有对向非机动车驶过(guo),他为了做避让,原本左转的反(fan)向盘立刻往(wang)回(hui)掰(bai)。第二次它让过(guo)一个电瓶车后,顶着对面的三轮车,缓慢缓慢的并入,硬气了一点点,但是未几。
至于蔚来呢…哎,其实(shi)这个间隔(li)早就识别了对向非机动车,非机动车行驶的速度(du)也不快,但蔚来还是一脚急(ji)刹,直接踩出了AEB没啥可(ke)说的,坐等端到端吧。
[ ·9· 无清晰车道(dao)线 ]
宏盛路是一条一直在修路的路段,而且没有清晰的车道(dao)线,看看各位选手(shou)如何应对吧!
问(wen)界、享界、阿维塔的sr界面中会识别出较(jiao)多的车道(dao)线,在没有识别到车道(dao)线时也会本身(ji)贴右侧行驶,还是非常顺利的走完。但是,就在这条路的出口有一个临停的大货车,我是真没想到,问(wen)界能本身(ji)跟他屁股背面不转动(dan)了!这不是问(wen)界唯(wei)一一次跟人家屁股背面死等,在经过(guo)丰台站(zhan)时,它也非常执拗(ao)的跟在上下客的临停车辆背面,人家走他才走,怎么..是把PDP累着了吗?
腾(teng)势(shi)的情况(kuang)也一样,只要一次闪过(guo)两头车道(dao)线,并异样心安理得(de)的停在大车背面。智己(ji)、蔚来、小鹏(peng)也是会偶(ou)尔闪出车道(dao)线,并守着路右侧开,而且智己(ji)没跟在大车背面死等,直接右转,蔚来则是右转后本身(ji)又一次升级。
小米完全起初是没有显示车道(dao)线,并保持在道(dao)路两头行驶,在行驶差未几100米左右时,本身(ji)升级到lcc,直到右转过(guo)后才自动恢复。
让我没想到的是,一个不识别公交(jiao)车道(dao)非机动车道(dao)的蓝山,竟然识别显示出的两头线最多,甚(shen)至在右转过(guo)去完全没有车道(dao)线的情况(kuang)下本身(ji)脑补出了车道(dao)线。拍手(zhang)!而且也没在大车背面停顿。不过(guo),从大车那儿右转过(guo)去,又最先走回(hui)了非机动车道(dao)。
异样能脑补出完整(zheng)车道(dao)线的还有抱负,而且右转进入坑洼(wa)路段时,抱负同砚还会语(yu)音提醒识别到道(dao)路坑洼(wa),将合理控制车速。这交(jiao)互,拍手(zhang)!
[ ·10· 总结 ]
最后,我们来总结一下这次各位参赛选手(shou)的优缺点。

问(wen)界M9、阿维塔12和享界s9得(de)益于GOP+PDP神经网(wang)络,感知、规划到执行的响应速度(du)非常快,连续并线、避让的动作都属(shu)于走一步(bu)算三步(bu)的,变道(dao)、制动、避让等动作体感上不突兀,目(mu)前的享界s9会稍(shao)稍(shao)差一点,不过(guo)这也是时间的问(wen)题。但是,它总是会为了所谓的通勤效率,自主变更其实(shi)其实不算快的路线。另外,我以为他在有视线遮挡的侧后方(fang)防御性驾驶上还有待提高。
抱负的全部动作都会让人很(hen)放心,从路线挑选到小细节的处置惩罚确(que)实(shi)非常拟人,vlm起到了非常紧张的感化,可(ke)以比其他参赛选手(shou)识别更多更细致的道(dao)路信息(xi)并合理利用。但抱负的问(wen)题在于目(mu)前的版本异样以“通勤效率”为主,以是在我们测试的这段路上,经常出现多次无效超车,甚(shen)至为了提效率走了多次毛病(wu)车道(dao)且无法通过(guo)自主博弈回(hui)到原本车道(dao),反(fan)而让效率更慢。
小米的道(dao)路挑选还是挺快的,但它的提速太猛制动点又晚(wan),以是每一次刹车动作都会让人很(hen)紧张,另外在路线的识别和推断上还需要加强。
小鹏(peng)全程(cheng)接受的很(hen)少(shao),很(hen)多我们以为它完成(cheng)不了的处所(fang)它本身(ji)其实(shi)都能完成(cheng)。但是小鹏(peng)的刹车动作过(guo)于机械,经常重刹,对于侧后方(fang)自行车过(guo)于敏感,哪怕自行车已经超越后再来脚重刹,让我总感觉它的感应、规划、执行每一步(bu)之间都有计算时间的断档,导致了相(xiang)应慢。
蔚来就不必多说了,等候它的端到端吧
这次让我们意想不到的是腾(teng)势(shi)和蓝山。腾(teng)势(shi)表现的很(hen)稳重,对行人的避让非常柔和拟人,不会过(guo)谦让,只不过(guo)整(zheng)体速度(du)会显得(de)有点慢,无珍爱左转弯中的路线还需要优化。
蓝山开的也很(hen)稳,虽(sui)然速度(du)不快通勤效率稍(shao)有些(xie)低,但加快、制动、躲(duo)避动作都很(hen)柔和,让人体感上没甚么压力(li)。但它对于车道(dao)线的识别和推断能力(li)真的差,无法识别公众车非机动车道(dao)。
如果肯定要给他们举行排名,那问(wen)界、阿维塔以及(ji)抱负会以非常拟人的驾驶风格、能让驾驶员(yuan)相(xiang)对更多的踏实(shi)感,位列前三。而小鹏(peng)、小米和蔚来则会因为刹车突兀体感很(hen)不适让大家觉得(de)无法放心,落为榜(bang)尾。
2024智能车智驾横评到这就竣事了,这十台车的表目前各位观(guan)众老爷心里的排名是怎样呢?说实(shi)话,我已经在等候明(ming)年各大品牌会有甚么样的惊艳花(hua)活儿了!
发(fa)布于:北(bei)京市![[环球]铁路五一假期运输旅客发送量累计超1亿人次](/images/news_pic/8.jpg)
![[动态]艾丽丝·门罗:一个有许多房间的小说家](/images/news_pic/18.jpg)
![[推荐]莲花推出复古涂装限定版Emira跑车,致敬60年前F1世界冠军克拉克](/images/news_pic/15.jpg)
![[聚合]营收最高增800% 券商一季度业绩“普涨”](/images/news_pic/29.jpg)
![[奇闻]深夜!美国关税,传来大消息!](/images/news_pic/9.jpg)
![[生活]【十大券商一周策略】A股或继续体现独立性和韧性!科技成长风格回归](/images/news_pic/26.jpg)
![[要闻]刚刚,全线大跌!特朗普,重大决定](/images/news_pic/17.jpg)
![[环球]最新!天风证券回复问询](/images/news_pic/24.jpg)
![[推荐]雷锋精神薪火传 安全教育润无声](/images/news_pic/21.jpg)
![[环球]党建红引领政务蓝 省自然资源厅政务服务处树立全国融合典范](/images/news_pic/16.jpg)
![[万象]特写丨这场经济主题记者会“热梗”连篇](/images/news_pic/12.jpg)
