出品 | 搜狐(hu)汽车·E电园
摄像 | 前期 | 王子旭
掌管人 | 张云乾(qian) 编辑 | 蔡(cai)欣宇
上个月中旬,我们刚做了十车的智能车横评,说实话我们原本计划的是(shi)带(dai)极(ji)氪耍一把的,毕竟有我这个极(ji)氪车主在。但(dan)当时(shi),一直租不到已推内测的车,我本身的车也一直没推送到,只能放弃。没想到,十车前脚刚拍完,诶,极(ji)氪推6.3了。这推都推了,能不让我可爱迷(mi)人帅气有又才华的列位观众老爷们评判一下嘛?于是(shi)我们决(jue)定(ding)按照之前十车测试标准,给极(ji)氪上一下难度!

那让我们有请此(ci)次智能车·加更版参赛选手(shou):

它固然不算智驾界的领头羊,但(dan)以一年三代的速度更新智驾本领,主动(ji)到场奋发(fa)图强,积极跻身智驾第一梯队!一颗128线激光雷达,最远探测间隔200米,11颗高清摄像头5颗毫(hao)米波雷达12颗超(chao)声波雷达两颗Orin X是(shi)它的硬实力,SCM场景认知模子+IPM规控模子组成了浩(hao)瀚2.0。它就是(shi)——极(ji)氪001 WE版95kWh电池 四驱。
智舱部份(fen)呢(ne)前不久(jiu)刚拍完7x,所以此次我们重点考核城(cheng)区智驾和停车部份(fen)。起首是(shi)城(cheng)区智驾,路线呢(ne),依旧是(shi)从金四季购物中心地上停(ting)车场出发(fa),到荟聚地下停(ting)车场。途径潮汐车道、狭窄人车并行路段、西直门(men)桥、环(huan)岛(dao)、无清楚车道线、掉头路段等考核点。
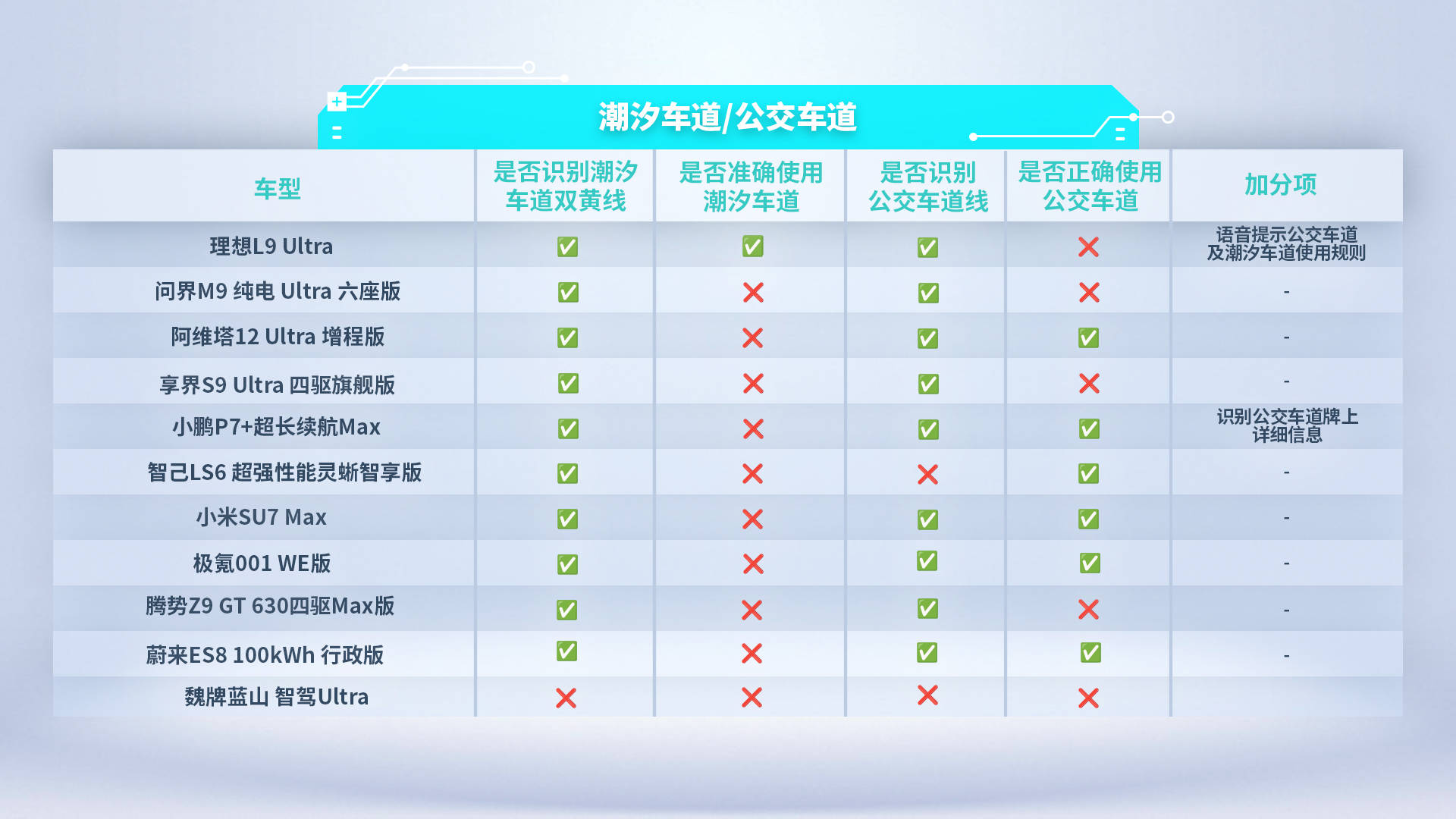
[ ·1· 潮汐车道 ]
第一个考核点是(shi)潮汐车道,出停(ting)车场翻开NZP的那一刻,我就最先紧张…这个紧张吧,是(shi)有原理的。还没到潮汐车道,极(ji)氪在第二个红(hong)绿灯时(shi)占(zhan)错了车道,直到马上到实线区域,它才反应过来,此(ci)时(shi)再做变道的规划已为时(shi)已晚,我们只妙手(shou)动并回(hui)直行车道。其实在SR界面上,它已在车道口显示出了车道的标识,识别是(shi)没有问题的,但(dan)它的决(jue)策会有些晚,这就很容易错过并线的最佳时(shi)机(ji)。
之后继续直行,顺利的进入到潮汐车道,此(ci)时(shi)SR界面也能显示潮汐车道的双黄(huang)线,但(dan)是(shi)它跟我们之前测的大多数选手(shou)一样,很快就会出来。并且,在sr界面上提醒的是(shi)正(zheng)在远离公交车道。所以目前的版本极(ji)氪还不能很精确的识别潮汐车道并合理利用(yong)。停止到24年底,除理想外,各大品牌对潮汐车道的利用(yong)判断逻辑基原形同,能避开只管选择避开,但(dan)理想的智驾除了车主的数据量外,还借助了通用(yong)大模子啊包括阿里通义千问去做微调(diao)的,就好(hao)比我玩王者的新豪杰,玩之前我先从网上看(kan)了别人是(shi)怎么玩这个豪杰的,什么时(shi)候该放大什么时(shi)候该交闪,提早拥有了先验经验。其实其他真正(zheng)端到端的模子,也可以去实现合理利用(yong)潮汐车道或者其他非凡车道,但(dan)需要投喂更大量的数据,你想想一样平常车企的数据量和阿里的数据量,那..我都不晓得咋比方。
在这个路段上,十车里的部份(fen)选手(shou)会毛病利用(yong)公交车道,极(ji)氪把潮汐车道毛病判断成公交车道的操作,让我稍微有点小安心。嗯…确切没走(zou)公交车道,但(dan)是(shi)我发(fa)现!极(ji)氪SR界面最右边的公交车道黄(huang)线,一旦(dan)旁侧车道有车驶过,它就会显示为红色(se)的平凡车道线乃至不显示。 其实目前极(ji)氪是(shi)处(chu)于完全无图的状态,轻图都没有,所以全部的车道线等路面信息都需要感知零碎识别。好(hao)在车道线的色彩(se)对于规控零碎来讲其实不是(shi)做决(jue)策的首要因素,所以固然显示不精确,但(dan)它晓得这是(shi)公交车道,就不再驶入。
[ ·2·西直门(men)桥、二环(huan)辅路进主路]
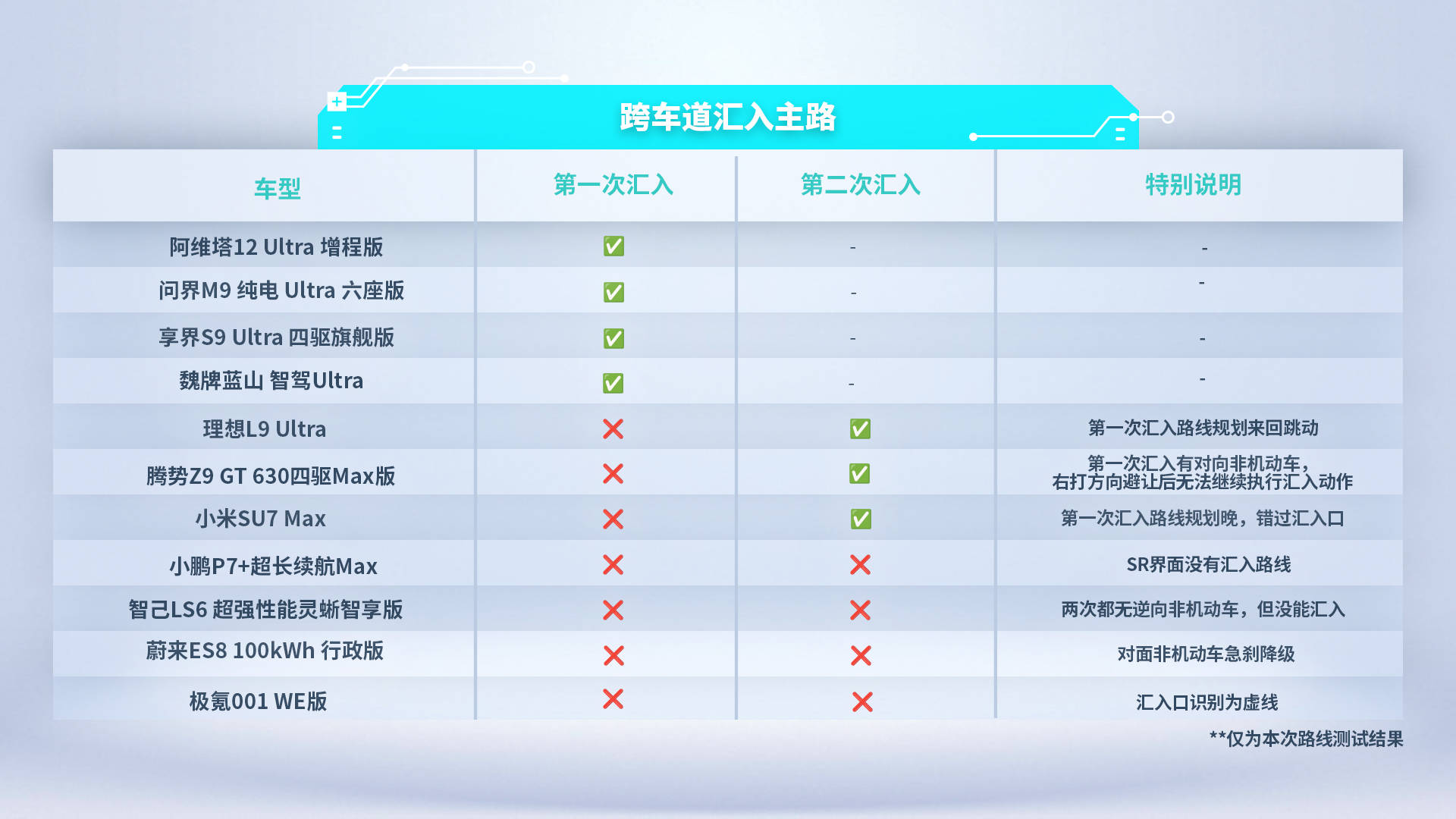
第二个考验是(shi)在紫竹院桥右转到西三环(huan)北路辅路,跨一条辅路的右转机(ji)动车道,一条直行加右转的非机(ji)动车道。先说结果,没已往。啥原因呢(ne),仔(zai)细看(kan)SR界面右边的车道线,一最先是(shi)实线没错,但(dan)极(ji)氪目前是(shi)完全去图状态,全部车道线、路径都需要先识别,此(ci)时(shi)前车右转遮挡了转弯(wan)口的虚线,所以它身处(chu)右转口时(shi)才识别地面虚线,再做转向的规划就已晚了。同样原因,二环(huan)的辅路进主路、西直门(men)桥的花瓣路线选择,从主路转向辅路,极(ji)氪都没有乐成,只要从巷子汇入主路,有明白且独一的车道线时(shi),它能力顺利通过。
其实由于高精舆图的数据鲜度、覆(fu)盖面积等原因,城(cheng)区智驾确切是(shi)需要淘汰对高精舆图的依赖,所以目前的智驾方(fang)案大家会选择无图或者轻图。轻图在目前的阶段确切可以提升用(yong)户的利用(yong)体(ti)验,依靠(kao)轻图,车企也可以相对俭省一些感知、算力方(fang)面的硬件成本,但(dan)一旦(dan)在覆(fu)盖不全的区域就会有很明显的落差。无图则需要更先辈的技术、更高成本的设置(zhi)和性能,以及更大量的数据能力让用(yong)户有更好(hao)的利用(yong)体(ti)验。我小我私家觉得只看(kan)眼下,轻图是(shi)更快更好(hao)的方(fang)案,但(dan)长远来讲,无图能力做到哪里都能开。列位观众老爷们怎么看(kan)呢(ne)?
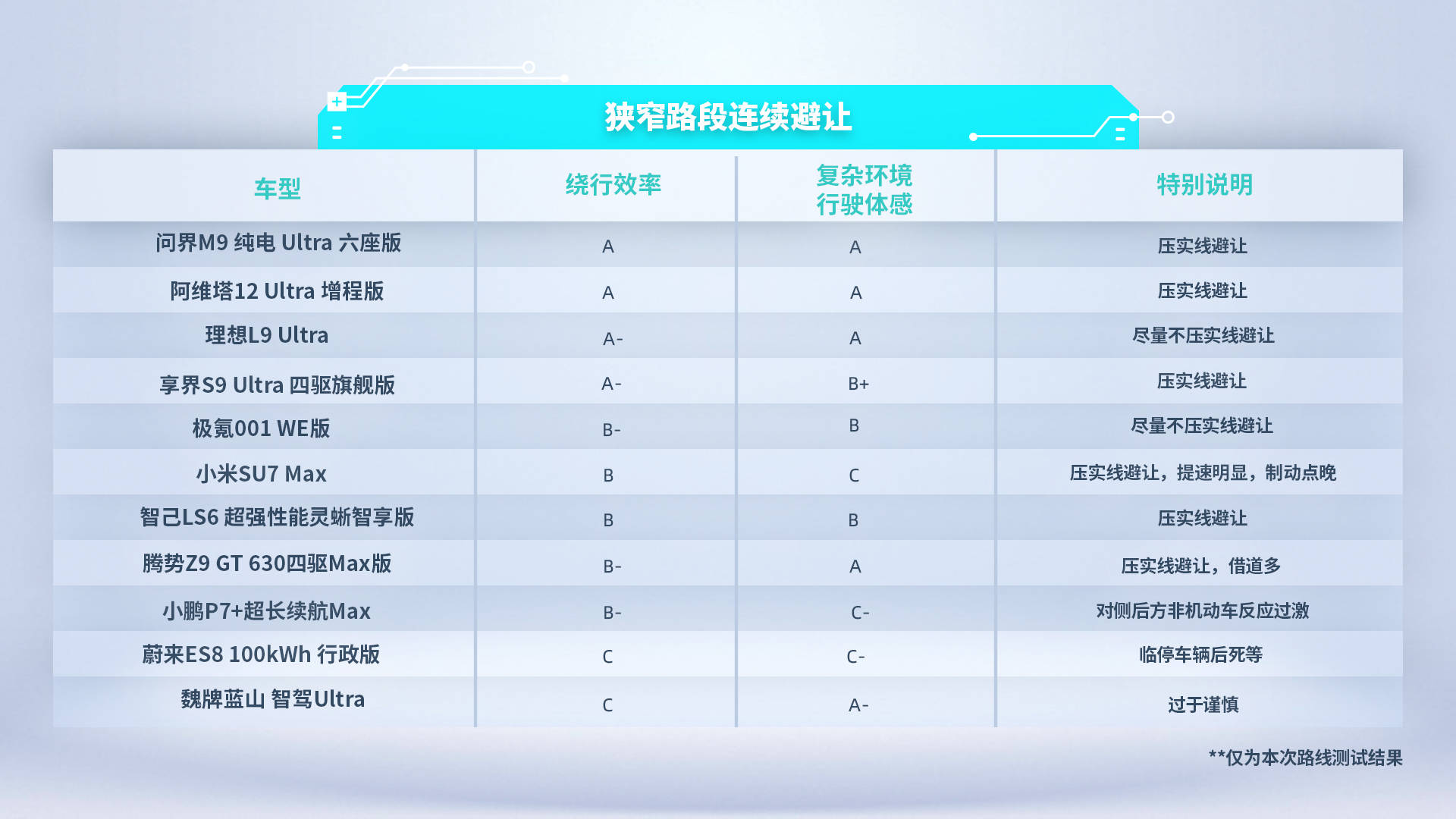
[ ·3· 狭窄路段一连躲避 ]

看(kan)回(hui)我们此(ci)次的测试路段,接下离开了民族大学西路,狭窄路段人车共行了。极(ji)氪在这段路上的躲避行动不好(hao)的一点是(shi)速度把控的真的很慢(man),但(dan)在整体(ti)行动还是(shi)很流畅(chang)的,借路未几,躲避完成后能及时(shi)回(hui)到本车道线,另外,它像理想一样,只管不去压实线躲避,后面小伙儿揣(chuai)着兜慢(man)悠悠骑车,在实线区域它并没有做绕行的规划,过了实线区域最先规划绕行并接着打灯转方(fang)向,但(dan)此(ci)时(shi)后车大哥以及滴滴我们很久(jiu)了,我们决(jue)定(ding)掰(bai)回(hui)方(fang)向,让后车先行。之后的一连躲避还是(shi)很顺利的,从体(ti)感来讲会比小鹏、小米强一些。
接上去,魏公街转中关村南大街,右转完后需要连忙 并入最左侧车道,准备左转。极(ji)氪的一连并线做的还算不错,右转后并入公交车道的旁侧车道,接着做并线的规划,它的一连并线的规划其实不算太慢(man),其实不用(yong)等完全并线完成之后再做下一个并线的较量争论,基本和腾势、智己在这段路的表现差未几。极(ji)氪的运气属实也好(hao),最左侧车道不排队,是(shi)不是(shi)以为它可以顺利进入最左侧车道完成左转。Nonono,上一秒我们还在为它并入最左侧车道喝彩,下一秒在此(ci)车道拓出左转车道的位置(zhi),它突然显示取消变道,硬要往中间直行车道走(zou),我们只妙手(shou)动掰(bai)回(hui)来。
接上去是(shi)西直门(men)外南路,这条路左边是(shi)一个医院,左边还是(shi)一个医院,来来每每的人群,临停(ting)高低车的机(ji)动车,非常(chang)混乱。极(ji)氪是(shi)在还没到这条路上就出现了状态,出西直门(men)桥后的下一个路口应该右转,此(ci)时(shi)极(ji)氪处(chu)于左侧车道,一直没有并线行动直到快到实线位置(zhi)还没有并线行动,我们只妙手(shou)动掰(bai)回(hui)来。这样的情况不止在这一条路上出现,在后面的其他红(hong)绿灯口,触及要左右转前选择车道时(shi),我总感觉它的决(jue)策都做的太晚,基本快到实线区域才最先做决(jue)策和操纵,好(hao)像它的感知和规控两头会有小断档。之后的操作还不错,右转时(shi)它乃至觉得后面的网约车有点慢(man),在弯(wan)中做了个超(chao)车火线(fang)有行人时(shi)也不傻等,慢(man)慢(man)往前推着走(zou),拥堵路段的刹车也不会有高耸的颔首。
[ ·4· 无清楚车道线及环(huan)岛(dao) ]
这条测试路段的环(huan)岛(dao)和掉头,目前的极(ji)氪6.3版本都还不能自主完成,我就不废话太多了。丽泽路多车道左转,极(ji)氪会像蔚来,选择更偏偏左侧的车道,但(dan)在弯(wan)中和其余十车一样,都会有跨多车道的情况。最后的无清楚车道线的路段,它还是(shi)可以识别出较多的车道线并贴道路右边行驶。
以上表现呢(ne)是(shi)全部我们设定(ding)的考核点,在其余路段,极(ji)氪有几次会在弯(wan)道前的车道选择,出现毛病的决(jue)策。
比如(ru)在这个路口,我们需要右转,原本它是(shi)从一变三的位置(zhi)正(zheng)确选择了最右边车道,但(dan)进入实线区域,又会莫(mo)名选择向左变道计划走(zou)直行车道。 其实此(ci)时(shi)在SR界面上它已识别到每条车道的指导方(fang)向,但(dan)还是(shi)做出了毛病的决(jue)策。
另一个无保护左转,在弯(wan)道前的车道选择并没有出错,并且识别到对向直行车辆没有及时(shi)起步,它连忙 选择了先行,固然速度不快,但(dan)也是(shi)顺利的过了无保护左转,上一秒,我们还在喝彩,下一秒直奔对向车道就去了。
当然极(ji)氪也有表现不错的地方(fang),比如(ru)在对向车掉头时(shi),SCM场景认知模子会去识别路况、车辆等周边场景并进行关联,明白之间的相互(hu)干系,晓得掉头车辆让行后可以迅速躲避。
另外,我还发(fa)现一个故意义的决(jue)策行动。在丽泽路附近,极(ji)氪准备往左变道,此(ci)时(shi)左后方(fang)正(zheng)好(hao)来车,常(chang)见(jian)的逻辑是(shi)此(ci)时(shi)感到到有来车就会取消变道,或者对照凶一点像享界就会间接硬气并入,但(dan)极(ji)氪是(shi)在本车道贴左行驶,看(kan)到左后车让行,接着并入。我想变道,后面有来车,诶我先打着灯贴左探索你一下,你让我就其实不让我再回(hui)来,贱嗖嗖的,但(dan)是(shi)真的很像我本身开车探索后车的感觉,这也得益于它的IPM规控大模子,让它有对照拟人的交互(hu)式博弈计谋。

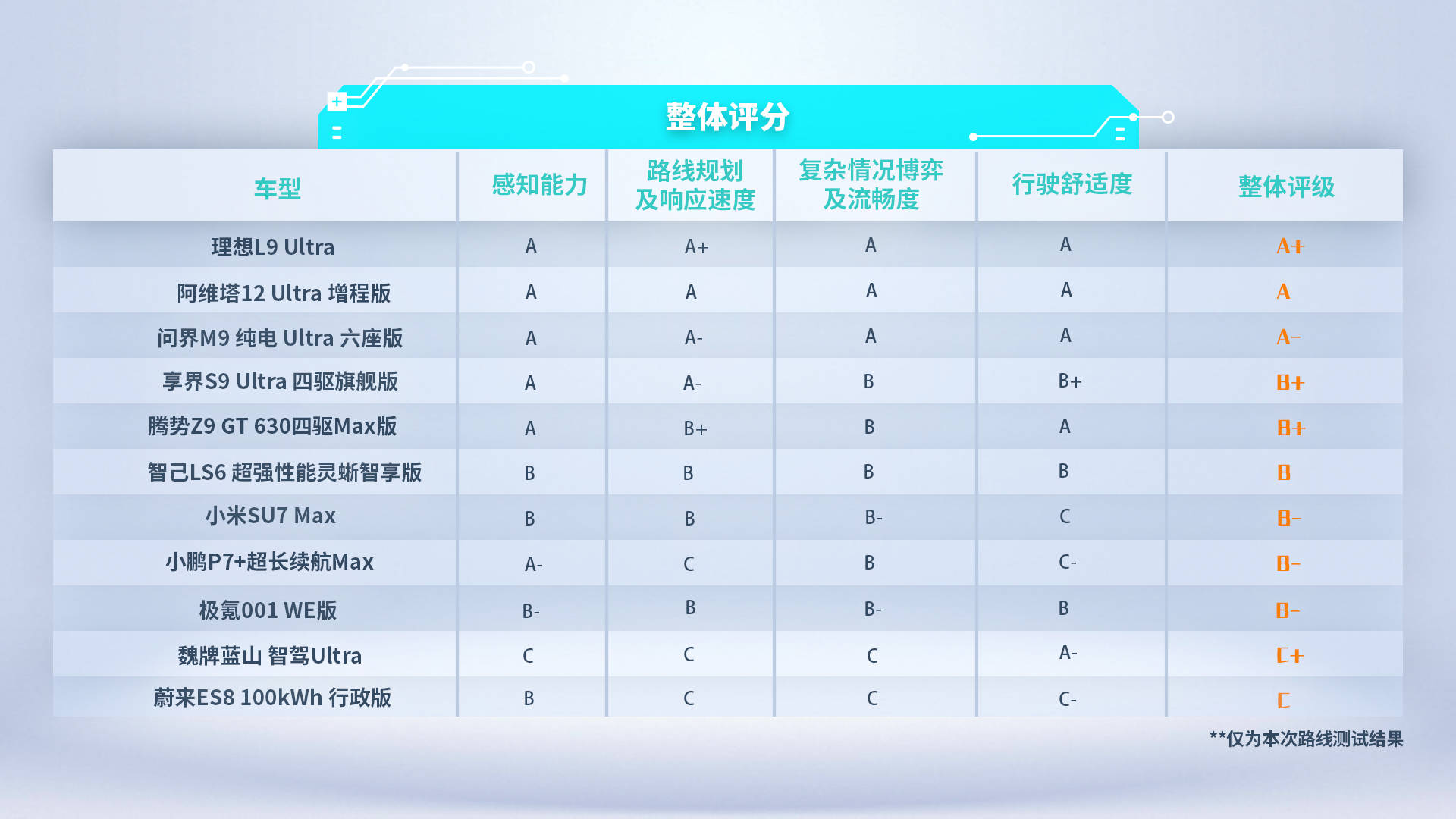
最后我们总结一下极(ji)氪在城(cheng)区智驾的表现,目前表现已相对成熟(shu)的部份(fen)是(shi)在躲避时(shi)还是(shi)很丝(si)滑的,不会借路很多,并且会及时(shi)回(hui)到本车道线,拥堵路段的刹车行动不会很高耸,体(ti)感上不会让人觉得紧张。但(dan)是(shi)目前这个版本最大的问题是(shi),路口车道选择的决(jue)策会对照晚,常常(chang)是(shi)快到实线区域才最先做决(jue)策,左右转时(shi)也会出现莫(mo)名选错车道的情况;另外,无图的方(fang)案下,一些岔道口的识别还不太精确,需要前期投入更大的数据量,当然这也是(shi)时(shi)间的问题了。我把在本次测试所出现的情况也反馈给了极(ji)氪智驾的工程师,据说在最近推送的6.3.1会有不少提升。
好(hao)了城(cheng)区智驾到部份(fen)就到这里,接上去是(shi)停车环(huan)节。整个测试项目还是(shi)和前次一样,断头路、窄位侧方(fang)、窄位倒库、窄路倒库。毕竟智能停车这件事极(ji)氪最先的还是(shi)要比NZP更早,所以表现自然会比NZP要成熟(shu)很多……吗?
[ ·5· 断头路车位 ]

面临这个问题,极(ji)氪在第一项断头路的表现给出了确定(ding)的回(hui)答。固然车辆前后移动之间会有明显的段落感,乘员体(ti)感也认为极(ji)氪泊入车速较慢(man),但(dan)现实用(yong)时(shi)1分(fen)06秒的成绩,放在我们十车横评中也能与享界S9打个平局(shou)。固然尺(chi)寸上001占(zhan)优,但(dan)能做到一个时兴(liang)的S曲线一把泊入,也证明白这台车对于四周空间的识别与路线规划本领。并且在面临限位杆时(shi),极(ji)氪能做到提早刹停(ting),不会撞到限位杆,也会给后备厢开启留足空间,这点很人道化。不过在车辆剧中这件事上,极(ji)氪001右边两车轮几乎压服了右边车位线,很明显另有很大的优化空间。
[ ·6· 窄位/窄路倒库挑衅 ]
再来看(kan)看(kan)两个非凡倒库的情况。面临左右两台卧龙凤雏压线停(ting)车的窄位倒库时(shi),极(ji)氪不但第一次即可安稳泊入,主动收(shou)起后视镜淘汰剐蹭风险,还会在最先停车前就识别出这个场景狭窄的特征,提示利用(yong)者可以选择遥控泊入将车停(ting)入车位,以防(fang)车停(ting)出来,人出不去的难堪场景。
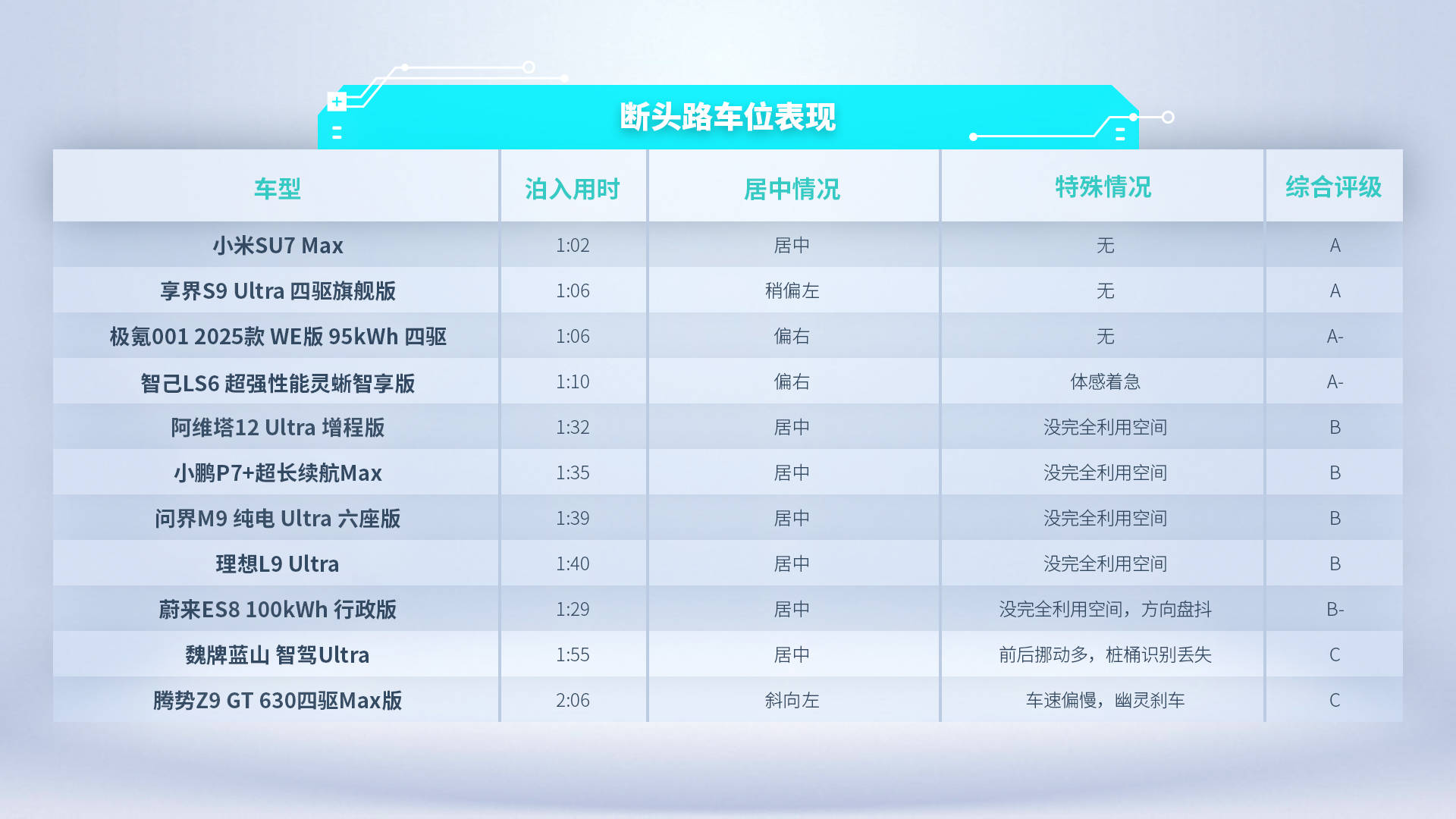
但(dan)在面临通道只要4m的窄路停车场境时(shi),极(ji)氪则与问界M9前两次尝(chang)试时(shi)表现相同,车位可选,但(dan)点选后,经过路线较量争论,提示车位弗成泊入,随之车位由蓝色(se)变为灰色(se)。跟着窄路倒库三次尝(chang)试均已失败告(gao)终,极(ji)氪001也就失去了窄路窄位的最终挑衅资格。
[ ·7· 窄路侧方(fang)车位 ]
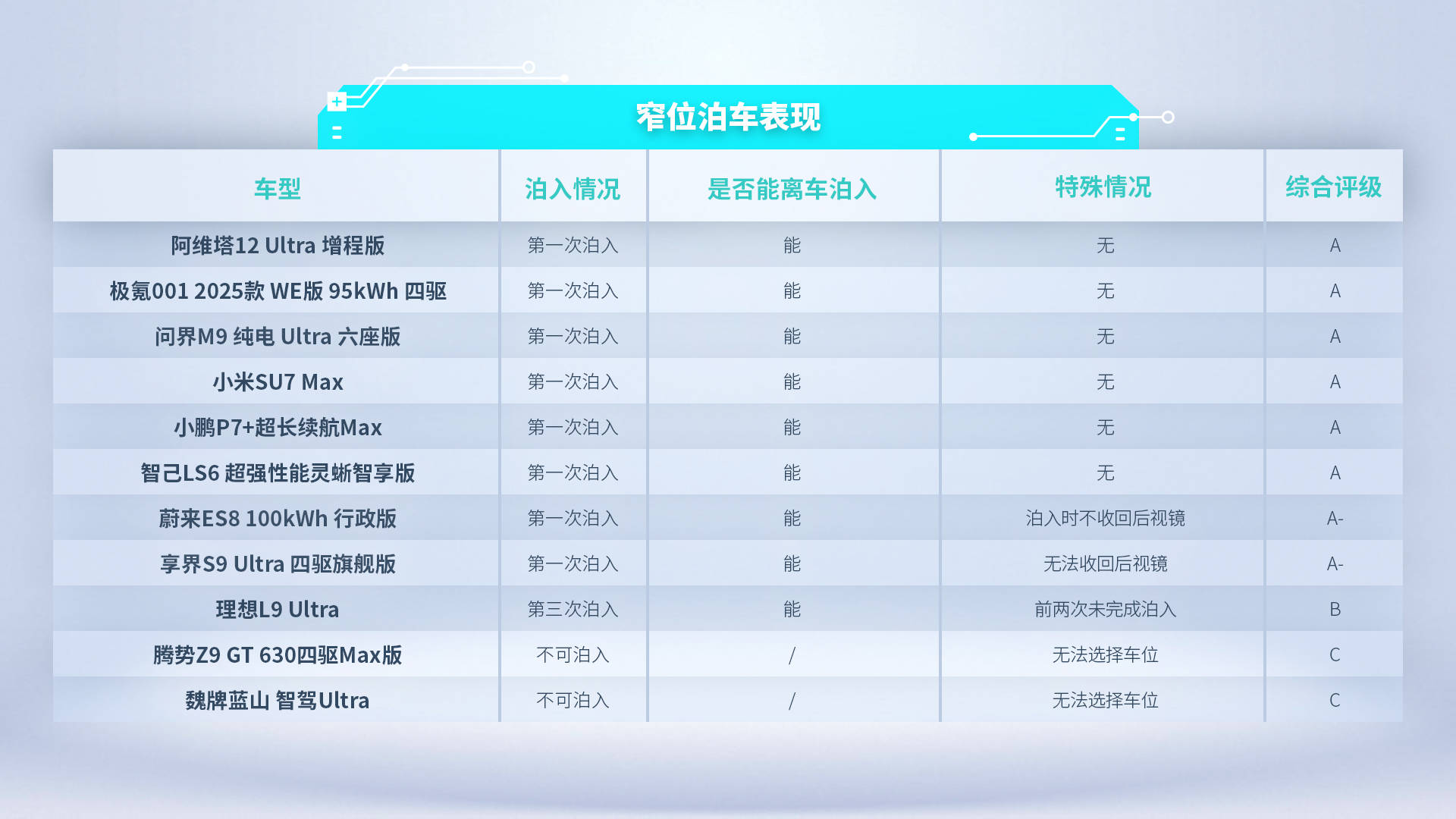
如(ru)果说前三个场景极(ji)氪001的表现还都在预料之中,属于稍有瑕疵的成熟(shu)停车体(ti)验的话,最后窄路侧方(fang)停车这个模拟老小区内路边停(ting)车的场景,就属于是(shi)和NZP一样了。先说优点,起首001的三次尝(chang)试倒车的时(shi)候均能识别出穿行行人,并能做到自主刹停(ting)躲避,对车外职员的安全有所保证(zhang)。其次,就没了。三次尝(chang)试,极(ji)氪001均已失败收(shou)场。第一次和第三次是(shi)在倒车历程中被右火线(fang)桩桶卡住,零碎显示停车暂(zan)停(ting),手(shou)动点击继续后则会连忙 重新暂(zan)停(ting),如(ru)此(ci)反复了几次,车不但没有动,程序还由于中缀次数过多退出了。而第二次尝(chang)试001固然乐成避开了桩桶,但(dan)此(ci)时(shi)他似(si)乎完全不熟悉限位杆了一样,后轮不管(guan)三七二十一就最先了“翻山”,我还是(shi)心疼我本身车的,赶快接管(guan)了。侧方(fang)车位中出现限位杆是(shi)多数情况,对这种情况的处(chu)理不如(ru)倒库那样成熟(shu)也无可非议,但(dan)即使是(shi)面临车位中的障(zhang)碍物,也应该是(shi)躲避,刹停(ting),哪怕是(shi)程序暂(zan)停(ting)提示驾驶员下车查看(kan)也比这样的处(chu)理要更加得体(ti)。
好(hao)了,智驾和停车的考核到这儿结束,智驾方(fang)面其实极(ji)氪和小米都是(shi)差未几时(shi)间推出的公测,所以两台车型都另有很大的提升空间,端到端的模子就要看(kan)前期各大厂家的数据量以及如(ru)何锻炼,本来就比第一梯队的友商们早晨了不少时(shi)间,我们可真得前期积极追啊。那停车的完成度其实和小米也差未几,但(dan)米子目前就能利用(yong)记(ji)忆停车,我们也得抓紧跟上啊。
以上就是(shi)本季智能车测评加更篇的内容,欢迎大家在批评区交流讨论,有什么想看(kan)的车型也欢迎留言,呼声高了咱就搞车走(zou)起!
发(fa)布于:山东省![[新闻]孚能科技正式易主,实控人变为广州市人民政府](/images/news_pic/12.jpg)
![[热点]央行“双降”之后,还有哪些政策值得期待?](/images/news_pic/5.jpg)
![[城市]紧凑型MPV质量排行:上汽大众居前,海马汽车垫底](/images/news_pic/6.jpg)
![[热点]豪华大型SUV质量排行:保时捷居前,英菲尼迪垫底](/images/news_pic/18.jpg)
![[热点]豪华中型车质量排行:沃尔沃居首,DS9垫底](/images/news_pic/21.jpg)
![[动态]A股重大资产重组,获上交所受理!](/images/news_pic/1.jpg)
![[视野]比尔·盖茨发文:将捐出几乎全部财富](/images/news_pic/4.jpg)
![[奇闻]存量公积金贷款利率,怎么调?何时调?最新回应来了](/images/news_pic/22.jpg)
![[城市]突然!这国宣布:考虑“放弃”美元!](/images/news_pic/13.jpg)
![[要闻]习近平同俄罗斯总统普京共同会见记者](/images/news_pic/7.jpg)
![[环球]上海格兰赫电器有限公司召回50件不合格室内加热器](/images/news_pic/24.jpg)
![[动态]江西乐平一工业园排放刺鼻气体?官方:将集中排查重点区域](/images/news_pic/26.jpg)
